
Robotics Laboratory - Projects
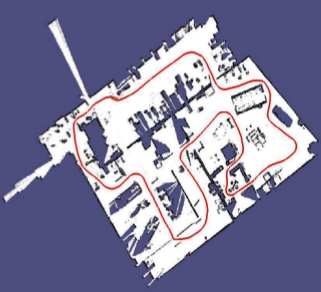
Project 1: A comparison of SLAM algorithms on rough terrain.
Contact: Dr. Christian Dornhege, Dr. Andreas HertleNavigation on rough terrain is a hard task for robots. One of the most important parts of this problem is to build a map based on sensor data during navigation. This is known as the simultaneous localization and mapping (SLAM) problem. A wide range of algorithms exist in the literature. In the project SLAM on rough/uneven terrain as in urban search and rescue scenarios is investigated. The task is to adopt existing state of the art SLAM implementations to a tracked robot and evaluate their performance qualitatively and quantitatively.

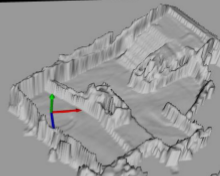
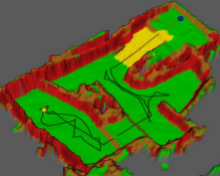
Project 2: Terrain classification on Octomaps.
Contact: Dr. Christian Dornhege, Dr. Andreas HertleNavigation on rough terrain is a hard task for robots. Given a 3D map of the terrain a robot needs to plan a safe, stable and efficient path over this terrain. Therefore a planning algorithm needs to have an estimate of the terrain traversability. This is given by a classification of the observed 3D map. In this project a classifier should be implemented that uses 3D occupancy grid maps represented by an OcTree (octomaps). The classifier should distinguish flat ground, walls, steps, ramps and rubble. State of the art algorithms for 3D data processing will be applied to solve this problem.
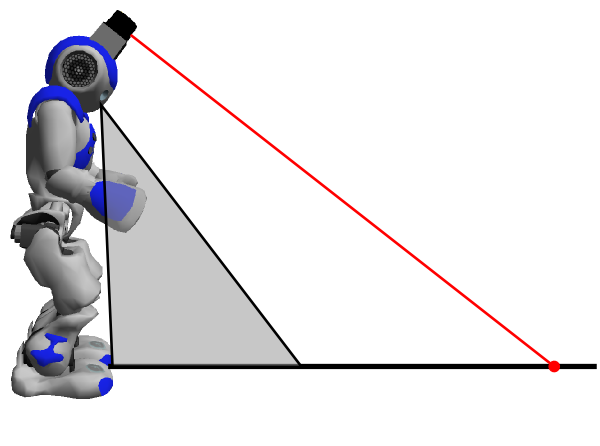
Project 3: Development of a generic robot calibration procedure.
Contact: Armin Hornung, Dr. Christian Dornhege, Dr. Andreas HertleRobot calibration is the process of determining sensor positions and properties on a mobile robot. This is often carried out by hand measuring, which leads to unprecise measurements. This is a source of error that influences every algorithm on the robot, and thus a proper calibration significanlty impacts the robot's performance. In this project a generic calibration procedure will be developed that can be applied to various robots. Given data in a known ground truth environment an error measure is defined and the calibration is derived by using a least squares error optimizer. It will be applied to 2D and 3D distance sensors on the Nao and the Rescue robot, but should be developed to be generic.
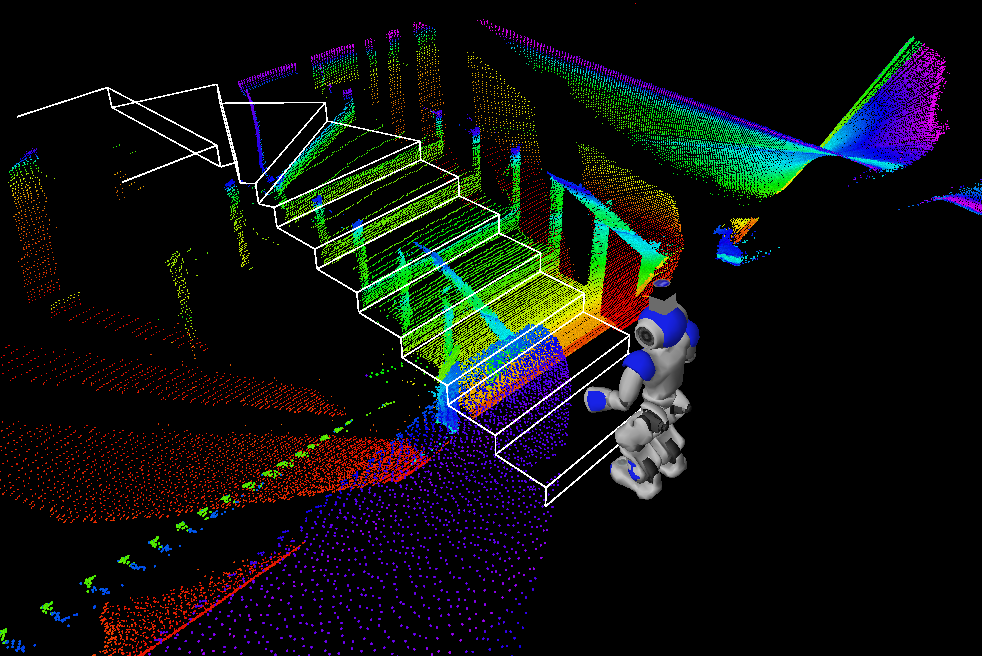
Project 4: High-level planning for humanoid navigation in cluttered environments (2-3 students).
Contact: Armin Hornung, Dr. Christian DornhegeThe goal of this project is to reach a navigation goal with a Nao humanoid. Along its path, various obstacles can block the way. Some of these can be kicked aside (e.g. a ball), others need to be carried away or need to be completely avoided. You will design some of these motions for the humanoid and integrate all actions in a global symbolic PDDL planner in ROS.

